|
|
|||||||||||||||||
詳細(xì)介紹
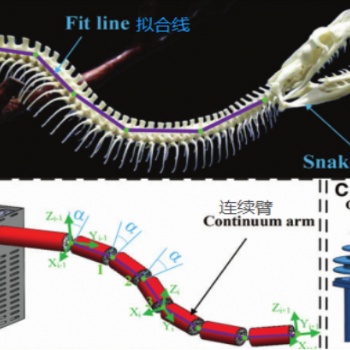
清除泥餅蛇形機器人具有超冗余自由度和后驅(qū)動裝置,采用后驅(qū)動連續(xù)關(guān)節(jié)來模擬蛇體的形態(tài)骨架結(jié)構(gòu),,該關(guān)節(jié)包括多個串聯(lián)的剛體關(guān)節(jié),每個剛體關(guān)節(jié)由鋼絲繩牽引驅(qū)動,,基于分層驅(qū)動原理,,可以在單個連續(xù)關(guān)節(jié)內(nèi)實現(xiàn)多個剛體關(guān)節(jié)的空間角同步運動,大大降低了機械臂運動和控制的復(fù)雜性,。通過力矩平衡和等效變換,,得到了蛇形機器人的靜、動態(tài)特性,。
清除泥餅蛇形機器人可以用于盾構(gòu)機刀盤泥餅的沖刷清理工作,,同時還可通過攜帶相機檢查刀盤狀況,并且具備探傷檢驗,、焊接,、切割等技術(shù)的集成能力,實現(xiàn)了盾構(gòu)機刀盤的多功能檢修維保,。具備以下優(yōu)勢:
1.遙控操作三維虛擬仿真平臺
2.精準(zhǔn)視覺定位與仿真模擬定位
3.EtherCA工業(yè)互聯(lián)網(wǎng)實現(xiàn)伺服電機聯(lián)動技術(shù)
聯(lián)系方式
|
